Temario:
y seguira creciendo....
Estructura:
para escoger la estructura del robot se puede usar lo que se desee o en nuestro caso de lo que se disponga pero siempre teniendo en cuenta que el modelo final debe ser robusto y soportar poco mas que una caída pudiendo ser de acrilico ,plastico ,tomar prestado el carro del hermano primo pequeño ,el punto es de que deba acomodarse a las necesidades que queremos que el robot cumpla .
para comenzar debemos tener una base donde se va ser construido el robot , el tamaño de la base dependerá de los componentes que tengamos por ejemplo la imagen que veremos a continuación nos indica una estructura que ha servido para un seguidor con servos son un poco mas grandes que los motores normales y tienen una forma rectangular de al rededor de 2 cm de grosor por 3 cm de anchura y 4 de alto
para comenzar debemos tener una base donde se va ser construido el robot , el tamaño de la base dependerá de los componentes que tengamos por ejemplo la imagen que veremos a continuación nos indica una estructura que ha servido para un seguidor con servos son un poco mas grandes que los motores normales y tienen una forma rectangular de al rededor de 2 cm de grosor por 3 cm de anchura y 4 de alto


detrás de estos tenemos las baterías , los sensores siempre Irán en la parte delantera de nuestro seguidor debido a que primero se debe sensar para tomar una desicion y realizar una acción mediante la placa de control esta ira en la parte superior para que sea mas facil de manipularla ya que esta es el cerebro del robot .
por supuesto que si nosotros vamos a armar los circuitos del seguidor en un protoboard (control) tenemos que hacer una estructura mas larga debido al tamaño del protoboard

aquí tenemos un ejemplo de un seguidor con un protoboard .
Conclusiones :
-Para tomar en cuenta la forma, tamaño y otras características de la estructura lo mejor es comenzar a armarlo una vez que se tiene los elementos para saber cual sera su tamaño la separación de los motores sensores baterías etc. o darles unos valores aproximados para luego no tener problema al armarlos .
-El material de el que va ha ser construido la estructura del seguidor debe ser estable es decir debe mantener la rigidez del robot y ademas este debe ser fácilmente adaptable para que nosotros podamos variar la estructura de este.
Locomoción (Movilidad):
la locomoción es la forma que tiene el robot para desplazarse , hay una infinidad de formas desde patas , ruedas alas hélices ,pero nosotros tenemos que enfocarnos exclusivamente en la movilidad terrestre ahora tenemos varios tipos de movilidad terrestre :
Por extremidades : un tipo de movilidad realmente muy atractiva para todos es la locomoción por patas en las cuales tenemos varias categorias apodos , bipedos, cuadrupedos ,hexapodos etc etc, pero la que se va a utilizar aqui son transmisores directos de momento angular de los motores tales como tenemos las ruedas y las orugas.

las orugas tienen una forma de trasmisión de movimiento muy interesante ya que combina el torque de los motores que se usen por lado en una banda que transmitirá el movimiento al piso para su desplazamiento pero tiene unas desventajas : costo, construcción , precisión en el movimiento especialmente en los giros .
La rueda es una pieza mecánica generalmente circular que gira alrededor de un eje es uno de los inventos fundamentales en la Historia de la humanidad, el conocimiento de su origen se pierde en el tiempo, y sus múltiples usos han sido esenciales en el desarrollo del progreso humano.
para elegir entre estos dos debemos hacer una comparación , cual de los dos brinda mas estabilidad al sistema de movimiento la oruga provee una adherencia al piso que nos beneficiaria para subir una pendiente muy inclinada pero también tienen que ver los motores aquí no solo es trabajo de la oruga , la oruga funciona muy bien en superficies irregulares pero las pistas de los sigue lineas es muy regular , las llantas solo entre las 2 no proporcionan un equilibrio al robot se necesitarían de un componente extra una rueda loca o un dispositivo que no tenga un rozamiento apreciable con el piso como para que cause una desviación de la trayectoria del robot . a si que las orugas son una buena opción pero al usarlas estaríamos restringiendo el movimiento las curvas del robot en una categoría que tomar bien una curva es vital a si que yo me inclino por las ruedas y la rueda loca.
Ruedas:
Para elegir las ruedas del seguidor debes saber el alto de tu robot el alto de los motores para no tener problemas luego con la movilidad , hay que considerar que mientras las ruedas son mas pequeñas la fuerza del seguidor sera mayor pero la distancia recorrida sera mas corta es decir el radio de las ruedas es directamente proporcional a la velocidad e indirectamente proporcional a la fuerza.
ahora como hacerlas? donde conseguirlas? como adaptarlas a los motores? si estamos usando servomotores destruncados el trabajo se vuelve ligeramente mas fácil ya que los servomotores tienen piezas de acople en donde se pueden poner el radio de la llanta ,si no solo hay que idearse la forma de que estas queden centradas y fijas , ademas el borde de la llanta debe estar cubierto de un material adherente para que el moverse tenga mas estabilidad y se pegue mejor al piso .
Recomendación:
al momento de fijar las llantas al motor o a los acoples evitarse usar silicona de pistola o usarla con cuidado ,por que si bien es la forma mas rápida de pegar las cosas , al momento de pegarlas se desprende o se crean unos hilos muy finos que luego se enredan en el eje o los engranes produciendo que se rompan o atasquen es mejor evitarse este tipo de inconvenientes. un taladro y unos tornillos y tuercas son la mejor salida a esto
Rueda loca:


Ruedas:
Para elegir las ruedas del seguidor debes saber el alto de tu robot el alto de los motores para no tener problemas luego con la movilidad , hay que considerar que mientras las ruedas son mas pequeñas la fuerza del seguidor sera mayor pero la distancia recorrida sera mas corta es decir el radio de las ruedas es directamente proporcional a la velocidad e indirectamente proporcional a la fuerza.
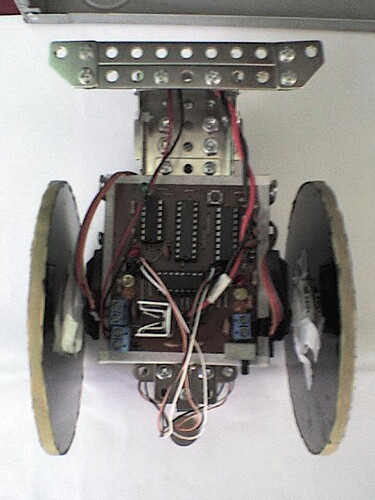
otra opción para la construcción de la estructura es usando estos legos metálicos que se
ve en la imagen se los puede encontrar en el juguetón no son muy caros
Recomendación:
al momento de fijar las llantas al motor o a los acoples evitarse usar silicona de pistola o usarla con cuidado ,por que si bien es la forma mas rápida de pegar las cosas , al momento de pegarlas se desprende o se crean unos hilos muy finos que luego se enredan en el eje o los engranes produciendo que se rompan o atasquen es mejor evitarse este tipo de inconvenientes. un taladro y unos tornillos y tuercas son la mejor salida a esto
Rueda loca:
hay barios modelos de ruedas locas pero bien todas sirven para el mismo fin que es brindarle una estabilidad al robot se los puede colocar alfrente en la parte de atras la cuestion es encontrar un equilibrio para el robot
Temario:
y seguira creciendo....
.......continuara
Sígueme en Twitter: @Slin_Dkdroid









No hay comentarios:
Publicar un comentario